Introduction
This project involves designing, building, programming, and testing a battery-powered remote-controlled robot that can detect metal using two different microcontroller systems.
Project Features
- Two Microcontroller Systems: Utilizes EFM8LB12 and STM32L051 microcontrollers from different families to control the remote and the robot, respectively.
- Battery Operated: Both the robot and the controller are powered by batteries, making the system fully mobile.
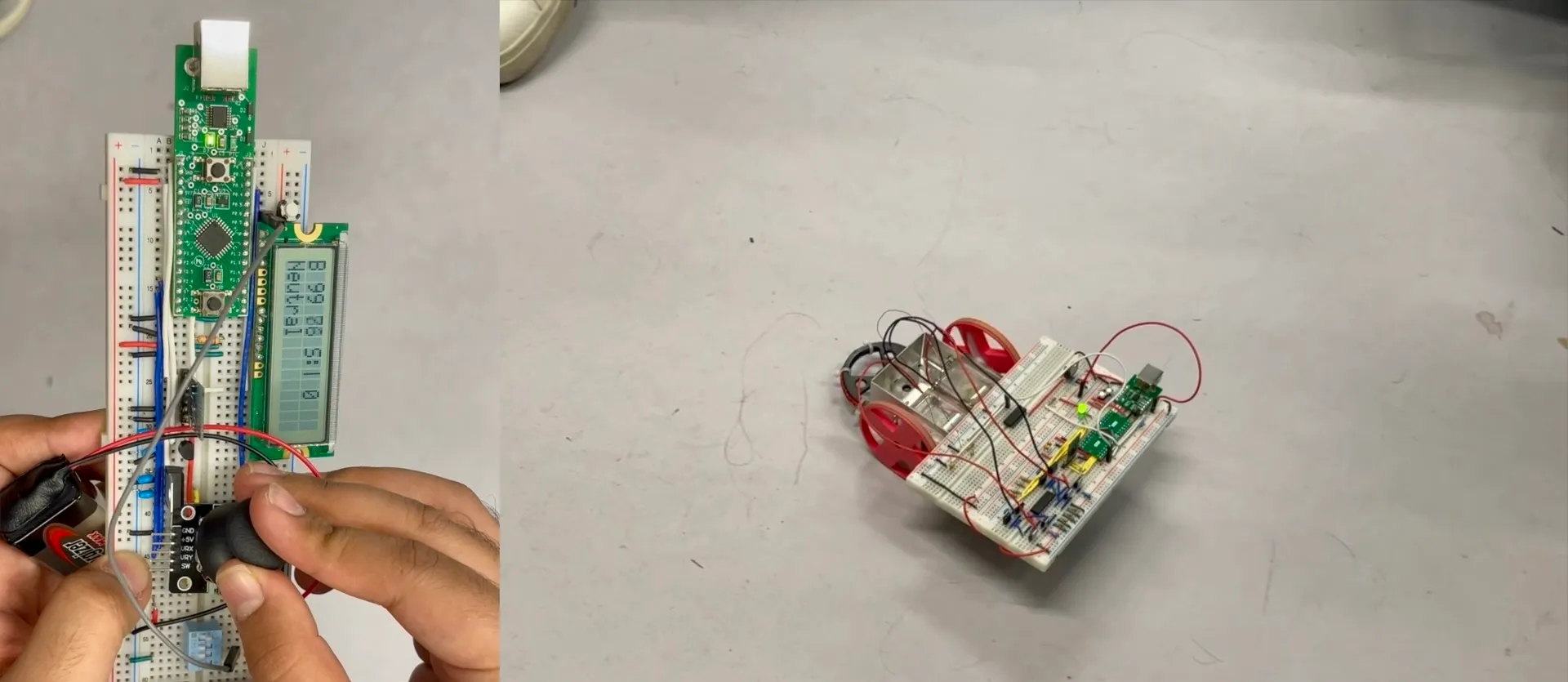
- Remote Operation: Controlled via a remote that displays metal detection strength and includes a buzzer that beeps at frequencies corresponding to the metal strength detected.
- Metal Detection: Includes a metal detector capable of detecting various metals and their strengths using a Colpitts oscillator configuration.
- Autonomous Capabilities: Features an ‘autonomous driving’ mode where the robot can navigate predefined paths without manual control.
Hardware Components
-
Robot:
- STM32L051 microcontroller
- JDY40 Radio
- Motors, wheels, and chassis
- Various sensors and actuators
-
Remote:
- EFM8LB12 microcontroller
- JDY40 Radio
- LCD display
- Joystick for navigation
Software Description
The robot and remote are programmed in C. The software includes functionality for:
- Remote control of the robot’s movement
- Real-time display of metal detection results
- Autonomous navigation based on pre-set conditions
Demonstration
- Here is a video showcasing the remote controlled metal detector robot in action: https://youtu.be/IKOVHH1TC6M
Future Improvements
- Enhance metal detection sensitivity and range.
- Implement machine learning algorithms to improve autonomous navigation capabilities.
- Upgrade the communication protocol for increased range and reliability.